综合实验
1.1 项目介绍
我们已经学习了所有的模块和传感器的使用方法,也学习了将它们搭配在一起组合实验。在这一实验课程中我们将搭配更多的模块和传感器组合在一起。参考前面实验编程的方法,利用按键模块,实现每按一次按键,功能就变换一次的效果。
实验多种多样,大家可以发挥想象力,搭配模块和传感器做出更多具有意义的实验。
1.2 实验组件







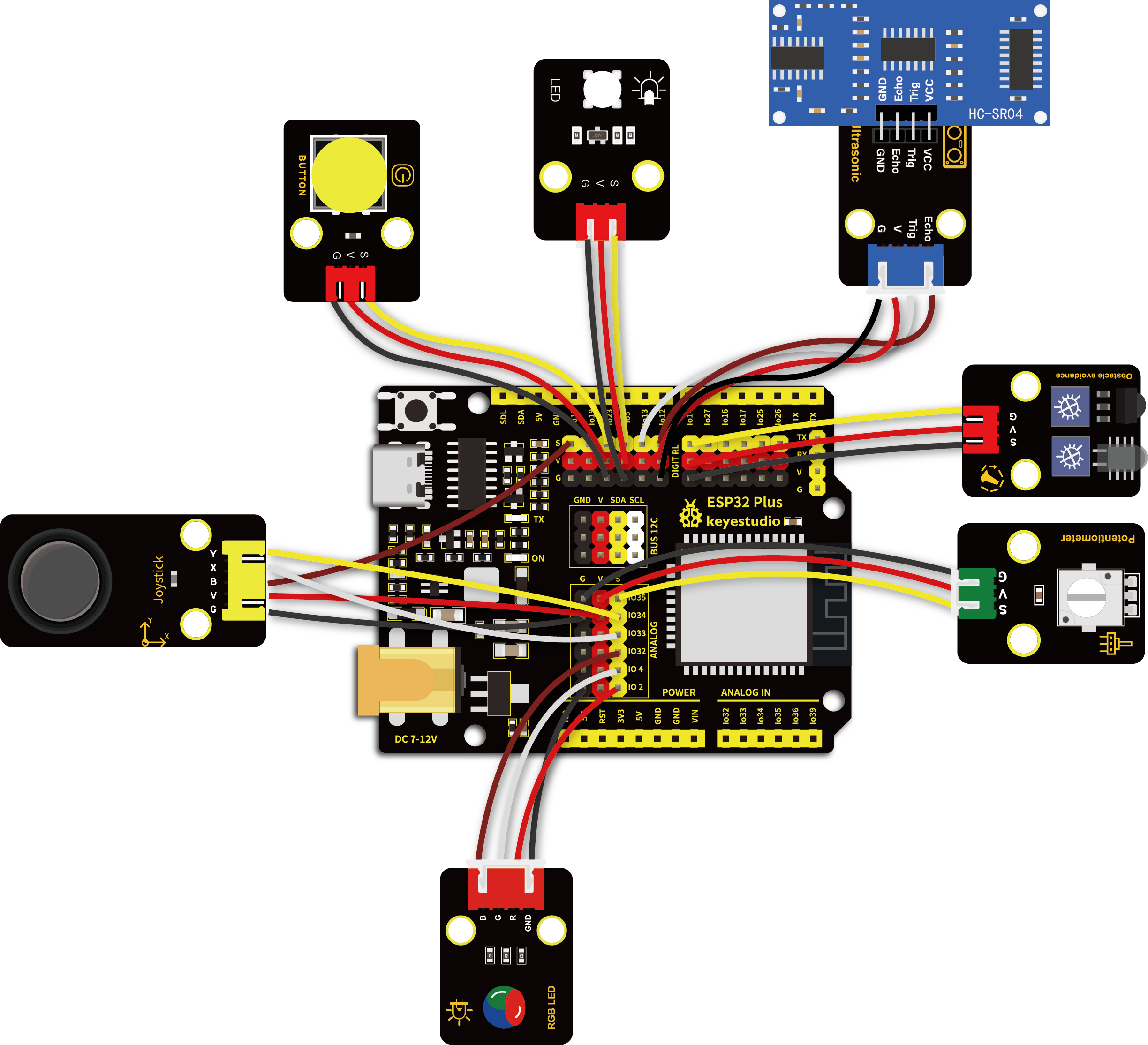
1.3 模块接线图
1.4 在线运行代码
from machine import ADC, Pin, PWM
import time
import machine
import random
pwm_r = PWM(Pin(2))
pwm_g = PWM(Pin(4))
pwm_b = PWM(Pin(32))
pwm_r.freq(1000)
pwm_g.freq(1000)
pwm_b.freq(1000)
potentiometer_adc=ADC(Pin(35))
potentiometer_adc.atten(ADC.ATTN_11DB)
potentiometer_adc.width(ADC.WIDTH_10BIT)
button = Pin(23, Pin.IN)
led = PWM(Pin(5,Pin.OUT),1000)
Avoiding = Pin(14, Pin.IN, Pin.PULL_UP)
button_z=Pin(18,Pin.IN,Pin.PULL_UP)
rocker_x=ADC(Pin(33))
rocker_y=ADC(Pin(34))
rocker_x.atten(ADC.ATTN_11DB)
rocker_y.atten(ADC.ATTN_11DB)
rocker_x.width(ADC.WIDTH_10BIT)
rocker_y.width(ADC.WIDTH_10BIT)
### 设置超声波引脚
trigger = Pin(13, Pin.OUT)
echo = Pin(12, Pin.IN)
def light(red, green, blue):
pwm_r.duty(red)
pwm_g.duty(green)
pwm_b.duty(blue)
### 超声波测距,单位:厘米
def getDistance(trigger, echo):
# 产生10us方波
trigger.value(0) #事先给一个短的低电平,以确保一个干净的高脉冲;
time.sleep_us(2)
trigger.value(1)
time.sleep_us(10)#拉高后,等待10微秒,立即调低
trigger.value(0)
while echo.value() == 0: #建立while循环,检测回波引脚值是否为0,并记录此时的时间
start = time.ticks_us()
while echo.value() == 1: #建立while循环,检查回波引脚值是否为1,并记录此时的时间
end = time.ticks_us()
d = (end - start) * 0.0343 / 2 #声波的传播时间x声速(343.2 m/s, 0.0343 cm/微秒),再除以来回距离2
return d
keys = 0
nums = 0
print(keys % 5)
def toggle_handle(pin):
global keys
keys += 1
print(keys % 4)
button.irq(trigger = Pin.IRQ_FALLING, handler = toggle_handle)
def showRGB():
R = random.randint(0,1023)
G = random.randint(0,1023)
B = random.randint(0,1023)
light(R, G, B)
time.sleep(0.3)
def showAvoiding():
if Avoiding.value() == 0:
print("0 There are obstacles") #按下打印相应信息
else:
print("1 All going well")
time.sleep(0.1) #延时0.1秒
def showJoystick():
B_value = button_z.value()
X_value = rocker_x.read()
Y_value = rocker_y.read()
print("button:", end = " ")
print(B_value, end = " ")
print("X:", end = " ")
print(X_value, end = " ")
print("Y:", end = " ")
print(Y_value)
time.sleep(0.1)
def adjustLight():
pot_value = potentiometer_adc.read()
led.duty(pot_value)
print(pot_value)
time.sleep(0.1)
def showDistance():
distance = getDistance(trigger, echo)
print("The distance is :{:.2f} cm".format(distance))
time.sleep(0.1)
while True:
nums = keys % 5 #按键次数对5取模得到0,1,2,3,4
if nums == 0: #根据RGB
showRGB()
elif nums == 1: #显示避让传感器的高低电平
showAvoiding()
elif nums == 2: #显示摇杆值
showJoystick()
elif nums == 3: #电位器调节LED
adjustLight()
elif nums == 4: #显示超声波测距值
showDistance()1.5 实验结果
按照接线图正确接好模块,用USB线连接到计算机上电,单击  来执行程序代码,代码开始执行。
来执行程序代码,代码开始执行。
(1)初始时没有按下按键,按键次数为 0 ,余数为 0 ,RGB模块循环闪烁随机颜色。
(2)按一下按键(时间稍长以便能检测到按键按下),RGB LED灯停止闪烁。此时按键次数为 1 ,余数为 1 ,实验实现避障传感器检测障碍物并读取高低电平的功能。
当传感器没有检测到障碍物时,value为1,“Shell”窗口打印出 “1 All going well” ,灯 SLED 不亮;当传感器检测到障碍物时,value为0,“Shell”窗口打印出 “0 There are obstacles” ,灯 SLED 亮。
(3)再按一下按键,按键次数为 2 ,余数为 2 。实验实现读取当前摇杆X轴和Y轴对应的模拟值以及Z轴(B接口)对应的数字值的功能。“Shell”窗口打印出当前摇杆X轴、Y轴和Z轴对应的值。
(4)再按一下按键,按键次数为 3 ,余数为 3 。实验实现利用可调电位器模块调节 LED(GPIO5)接口输出的PWM值,从而调节紫色LED模块上LED亮度的功能。“Shell”窗口打印出当前输出的模拟值。
(5)再按一下按键,按键次数为 4 ,余数为 4 。实验实现的功能是利用超声波模块检测距离并在“Shell”窗口打印出来。
(6)再按一下按键,按键次数为 5 ,余数为 0 。实现初始时RGB循环闪烁随机颜色的效果。不断地按下按键,余数循环变化,实验功能也循环变化。
单击  或按Ctrl+C退出程序。
或按Ctrl+C退出程序。