摇杆模块
项目介绍
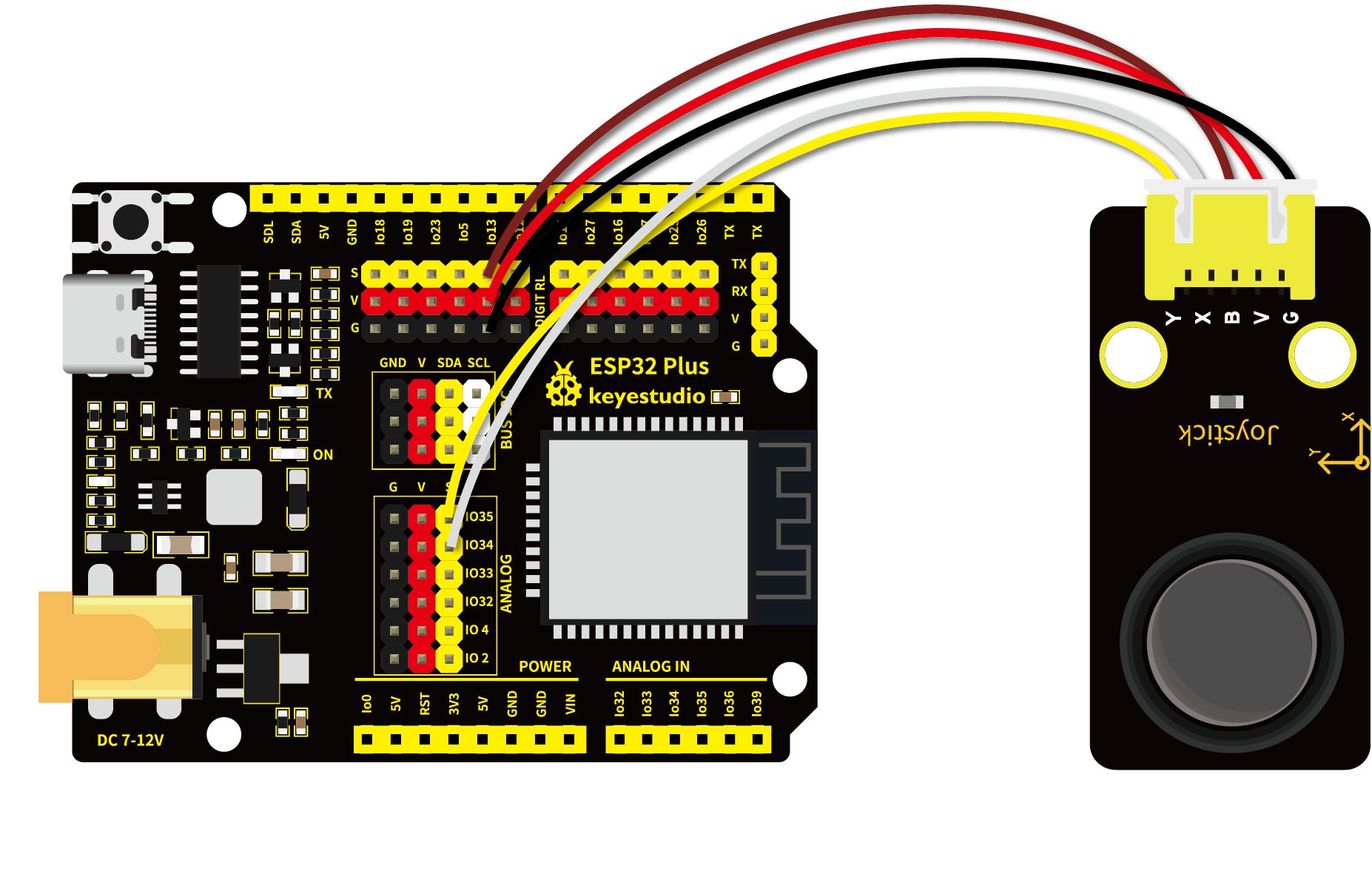
你看过游戏手柄吗?游戏手柄上有按键,还有摇杆。摇杆是什么工作原理呢?在我们这个套件中,就有一个Keyes 摇杆模块,它的主要元件是PS2手柄摇杆。控制时,我们需要将模块的X端口和Y端口连接至单片机的模拟口。B端口连接至单片机数字口,V端口接至单片机电源输出端(3.3-5V),GND接单片机GND。通过读取两个模拟值和一个数字口的高低电平情况,可以判断模块上摇杆的工作状态。
模块参数
模块原理图
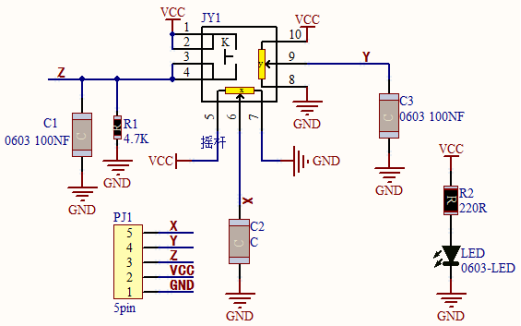
其实它的原理非常简单,内部相当于两个可调电位器(左右和上下)和一个按键。按键没有按下时被R1下拉为低电平,按下时接通VCC即为高电平,与我们前面学习过的按键模块的电平值是相反的。摇动摇杆时内部的电位器就会根据摇杆的摇动调节,从而输出不同的电压,可以读取到模拟值。
实验组件
ESP32 Plus主板 x1
Keyes 摇杆模块 x1

XH2.54-5P 转杜邦线母单线 x1

USB线 x1
模块接线图
代码
from machine import Pin, ADC
import time
# 初始化摇杆模块(ADC功能)
rocker_x=ADC(Pin(34))
rocker_y=ADC(Pin(35))
button_z=Pin(13,Pin.IN,Pin.PULL_UP)
# 设置两个ADC通道的电压采集范围为0-3.3V,并且采集的数据宽度为0-4095
rocker_x.atten(ADC.ATTN_11DB)
rocker_y.atten(ADC.ATTN_11DB)
rocker_x.width(ADC.WIDTH_12BIT)
rocker_y.width(ADC.WIDTH_12BIT)
# 在代码中,将Z_Pin配置为上拉输入模式
# 在loop()中,使用Read()读取X轴和Y轴的值
# 并使用value()读取Z轴的值,然后显示它们
while True:
print("X,Y,Z:",rocker_x.read(),",",rocker_y.read(),",",button_z.value())
time.sleep(0.5)
import time
# 初始化摇杆模块(ADC功能)
rocker_x=ADC(Pin(34))
rocker_y=ADC(Pin(35))
button_z=Pin(13,Pin.IN,Pin.PULL_UP)
# 设置两个ADC通道的电压采集范围为0-3.3V,并且采集的数据宽度为0-4095
rocker_x.atten(ADC.ATTN_11DB)
rocker_y.atten(ADC.ATTN_11DB)
rocker_x.width(ADC.WIDTH_12BIT)
rocker_y.width(ADC.WIDTH_12BIT)
# 在代码中,将Z_Pin配置为上拉输入模式
# 在loop()中,使用Read()读取X轴和Y轴的值
# 并使用value()读取Z轴的值,然后显示它们
while True:
print("X,Y,Z:",rocker_x.read(),",",rocker_y.read(),",",button_z.value())
time.sleep(0.5)
实验结果
按照接线图正确接好模块,用USB线连接到计算机上电,单击  来执行程序代码。代码开始执行,“Shell”窗口将打印出当前摇杆X轴和Y轴对应的模拟值以及Z轴对应的数字值,移动摇杆或按下它将改变“Shell”窗口中的模拟值和数字值。当按下摇杆时,Z值为1;未按下摇杆时,Z值为0。X值从左到右由0增长到4095。Y值从下到上由0增长到4095。
来执行程序代码。代码开始执行,“Shell”窗口将打印出当前摇杆X轴和Y轴对应的模拟值以及Z轴对应的数字值,移动摇杆或按下它将改变“Shell”窗口中的模拟值和数字值。当按下摇杆时,Z值为1;未按下摇杆时,Z值为0。X值从左到右由0增长到4095。Y值从下到上由0增长到4095。
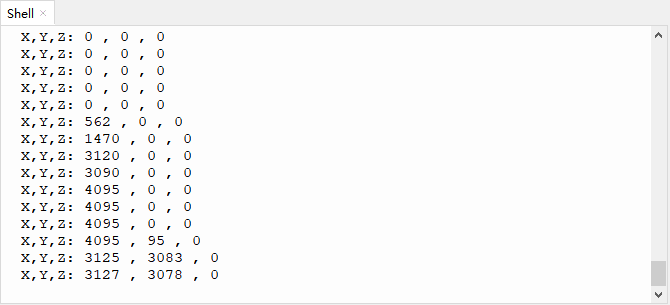
在X轴上移动摇杆,使数据从小到大
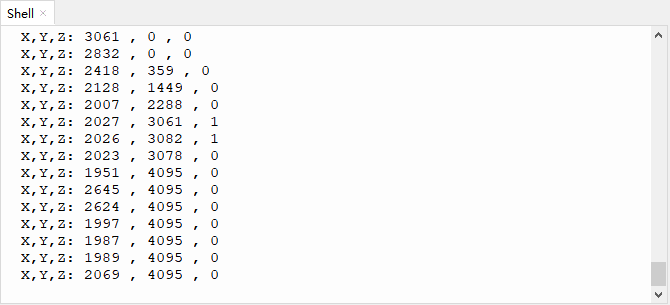
在Y轴上移动摇杆,使数据从小到大
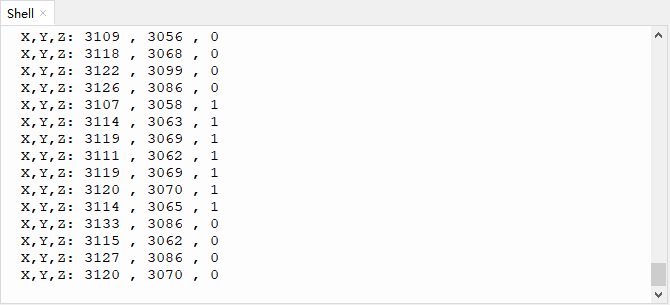
按下摇杆
单击  或 Ctrl+C 退出程序
或 Ctrl+C 退出程序
代码说明
注意事项:
1. 摇杆模块请勿用力拉拽,避免损坏。
2. 如Shell窗口无输出,请检查接线和端口设置。
3. 按键Z为上拉输入,按下为1,未按下为0,与普通按键模块相反。
1. 摇杆模块请勿用力拉拽,避免损坏。
2. 如Shell窗口无输出,请检查接线和端口设置。
3. 按键Z为上拉输入,按下为1,未按下为0,与普通按键模块相反。